Global horizontal datum
Introduction
In contrast to local horizontal datum systems which apply only to a specific country or localized area of the Earth’s surface, global datum systems approximate the Geoid as a mean Earth ellipsoid.
Explanation
With increasing demands for global surveying, activities are underway to establish global reference surfaces. The motivation in this is to make geodetic results mutually compatible and to be able to provide coherent results to other disciplines, e.g. astronomy and geophysics.
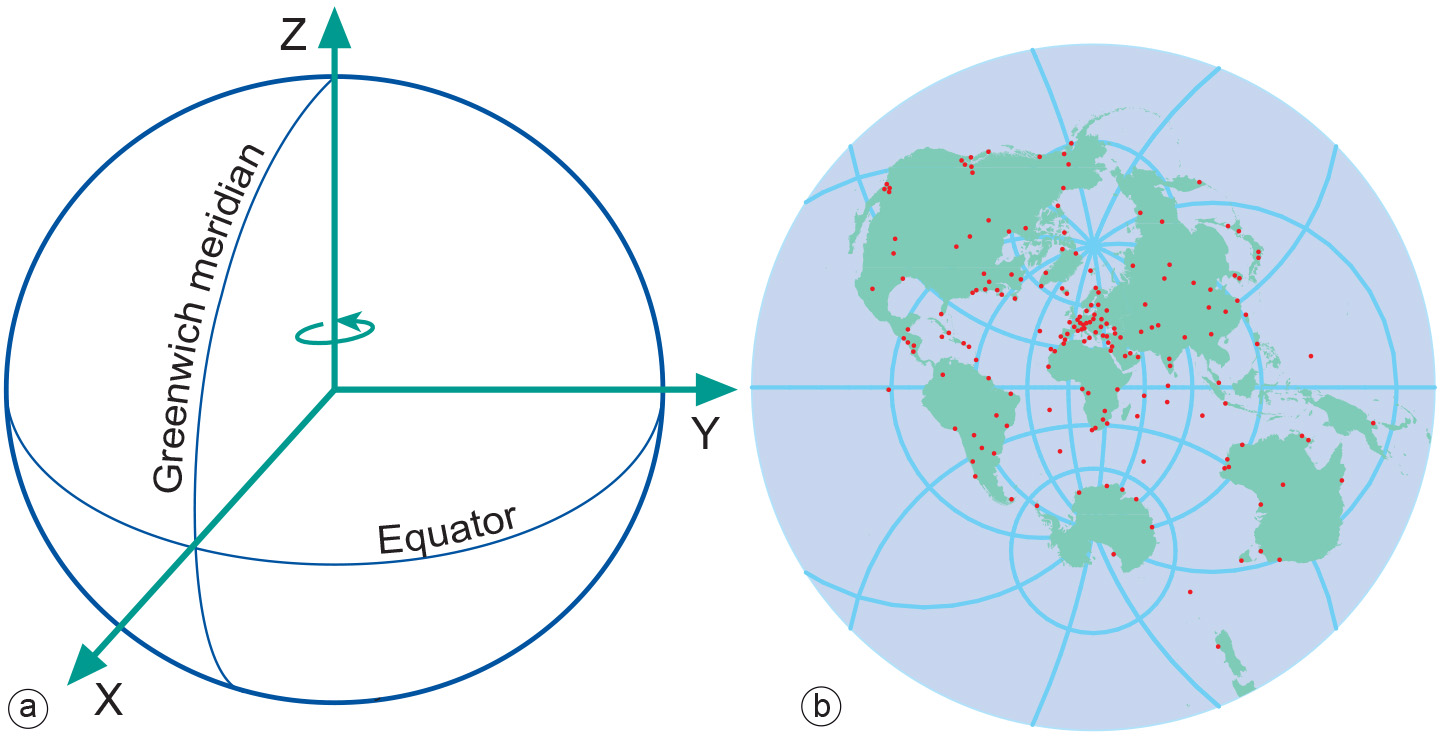
The most important global (geocentric) spatial reference system for the geoinformation community is the International Terrestrial Reference System (ITRS). This is a three-dimensional coordinate system with a well-defined origin (the centre of mass of the Earth) and three orthogonal coordinate axes (X, Y, Z). The Z-axis points towards a mean North Pole. The X-axis is oriented towards the mean Greenwich meridian and is orthogonal to the Z-axis. The Y -axis completes the right-handed reference coordinate system.
The International Terrestrial Reference Frame (ITRF)
The ITRS is realized through the International Terrestrial Reference Frame (ITRF), a distributed set of ground control stations that measure their position continuously using GPS. Constant re-measuring is needed because of the addition of new control stations and ongoing geophysical processes (mainly tectonic plate motion) that deform the Earth’s crust at measurable global, regional and local scales. These deformations cause positional differences over time and have resulted in more than one realization of the ITRS. Examples are the ITRF96 and the ITRF2000. The ITRF96 was established on 1 January 1997, which means that the measurements use data acquired up to 1996 to fix the geocentric coordinates (X, Y and Z in metres) and velocities (positional change in X, Y and Z in metres per year) of the different stations. The velocities are used to propagate measurements to other epochs (times). The trend is to use the ITRF everywhere in the world for reasons of global compatibility.
GPS uses the World Geodetic System 1984 (WGS84) as its reference system. It has been refined on several occasions and is now aligned with the ITRF to within a few centimetres worldwide. Global horizontal datums, such as ITRF2000 or WGS84, are also called geocentric datums because they are geocentrically positioned with respect to the centre of mass of the Earth. They became available only recently (roughly, since the 1960s), as a result of advances in extra-terrestrial positioning techniques.(1)
Since the range and shape of satellite orbits are directly related to the centre of mass of the Earth, observations of natural or artificial satellites can be used to pinpoint the centre of mass of the Earth, and hence the origin of the ITRS.(2) This technique can also be used for the realization of global ellipsoids and datums at levels of accuracy required for large-scale mapping.
To implement the ITRF in a particular region, a densification of control stations is needed to ensure that there are enough coordinated reference points available in that region. These control stations are equipped with permanently operating satellite positioning equipment (i.e. GPS receivers and auxiliary equipment) and communication links. Examples of (networks consisting of) such permanent tracking stations are the Actief GNSS Referentie Systeem Nederland (AGRS) in the Netherlands and the Satellitenpositionierungsdienst der deutschen Landesvermessung (SAPOS) in Germany.
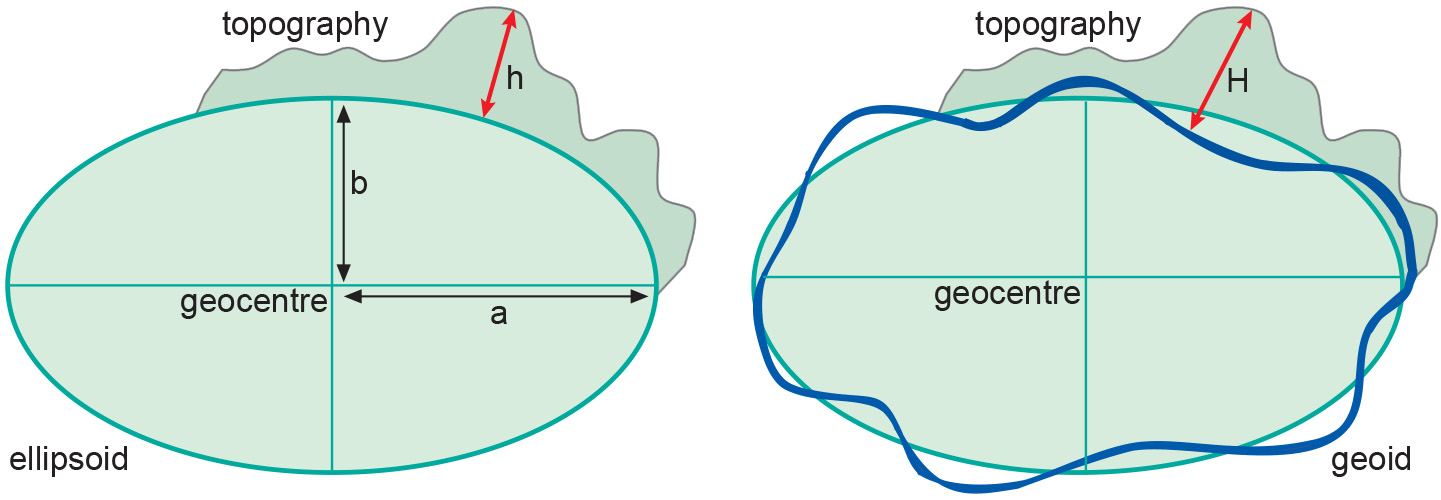
We can transform ITRF coordinates (X, Y and Z in metres) into geographic coordinates (ϕ, λ, h) with respect to the GRS80 ellipsoid without the loss of accuracy. However the ellipsoidal height h obtained through this straightforward transformation has no physical meaning and is contrary to our intuitive human perception of height. Therefore, we use instead the height, H, above the Geoid. It is foreseeable that global 3D spatial referencing in terms of (ϕ, λ, H) could become ubiquitous in the next 10–15 years. If, by then, all published maps are also globally referenced the underlying spatial referencing concepts will become transparent and, hence, irrelevant to users of geoinformation.
Hundreds of existing local horizontal and vertical datums are still relevant because they form the basis of map products all over the world. For the next few years we still have to deal with both local and global datums, until the former are eventually phased out. During the transition period, we will need tools to transform coordinates from local horizontal datums to a global horizontal datum and vice versa. The organizations that usually develop transformation tools and make them available to the user community are provincial or national mapping organizations (NMOs) and cadastral authorities.
Examples
In 1924, the general assembly of the IUGG in Madrid introduced the ellipsoid determined by Hayford in 1909 as the international ellipsoid. According to subsequently acquired knowledge, however, the values for this ellipsoid give an insufficiently accurate approximation. At the 1967 general assembly of the IUGG in Luzern, the 1924 reference system was replaced by the Geodetic Reference System 1967 (GRS 1967) ellipsoid. Later, in 1980, this was in turn replaced by the Geodetic Reference System 1980 (GRS80) ellipsoid.
| Name | a (m) | b (m) | f |
| International (1924) | 6378388. | 6356912. | 1:297.000 |
| GRS 1967 | 6378160. | 6356775. | 1:298.247 |
| GRS 1980 & WGS84 | 6378137. | 6356752. | 1:298.257 |
Table: Three global ellipsoids defined by a semi-major axis a, semi-minor axis b, and flattening f. For all practical purposes, the GRS80 and WGS84 can be considered to be identical.
Synonyms
Geocentric datum
Learning outcomes
-
7 - Coordinate systems and map projections
Explain the relevance of reference surfaces, coordinate systems, and coordi-nate transformations in mapping (level 1 and 2).
Prior knowledge
Outgoing relations
- Global horizontal datum is a kind of Horizontal datum
- Global horizontal datum is modelled by Ellipsoid