Errors in Absolute positioning
Introduction
Users of receivers are required to be sufficiently familiar with the technology in order to avoid real operating blunders such as poor receiver placement or incorrect receiver software settings, which can render positioning results virtually useless. We will skip over many of the physical and mathematical details underlying these errors; they are only mentioned here to raise awareness and understanding among users of this technology. For background information on the calculation of positional error (specifically, the calculation of RMSE or root mean square error), see RMSE page.
Explanation
Errors related to the space segment
As a first source of error, operators of the control segment may, for example in times of global political tension or war, intentionally deteriorate radio signals from satellites to the general public to avoid optimal use of the system by a perceived enemy. This selective availability—meaning that military forces allied with the control segment will still have access to undisturbed signals—may cause error that has an order of magnitude larger than all other error sources combined. A second source occurs if the satellite signal contains incorrect information. Assuming that it will always know its own identifier, the satellite may make two kinds of error:
-
Incorrect clock reading. Even atomic clocks can be off by a small margin, and thanks to Einstein we know that moving clocks are slower than stationary clocks, due to a relativistic effect. If one understands that a clock that is off by 0.000001 s causes an computation error in the satellite’s pseudorange of approximately 300 m, it becomes clear that these satellite clocks require very strict monitoring.
-
Incorrect orbit position. The orbit of a satellite around our planet is easy to describe mathematically if both bodies are considered point masses, but in real life they are not. For the same reasons that the Geoid is not a simply shaped surface, the gravitation pull of the Earth that a satellite experiences in orbit is not simple either. Moreover, satellite orbits are also disturbed by solar and lunar gravitation, making flight paths slightly erratic and difficult to forecast exactly.
Both types of error are strictly monitored by the ground control segment, which is responsible for correcting any errors of this nature, but it does so by applying an agreed-upon tolerance. A control station can obviously compare results of positioning computations such as those discussed above with its accurately known position, flagging any unacceptable errors and potentially labelling a satellite as temporarily “unhealthy” until those errors have been corrected and brought back within the agreed tolerance limits. This may be done by uploading a correction to the clock or the satellite’s orbit settings.
Errors related to the medium
A third source may be due to the influence of the medium between sender and receiver on the satellite’s radio signals. The middle atmospheric layers of the stratosphere and mesosphere are relatively harmless and of little hindrance to radio waves, but this is not true of the lower and upper layers of the atmosphere:
-
The troposphere: the approximate 14 km-high airspace directly above the Earth’s surface, which holds most of the atmosphere’s oxygen and which envelops all phenomena that we call the weather. It is an obstacle that delays radio waves in a rather variable way.
-
The ionosphere: the part of the atmosphere that is farthest from the Earth’s surface. It starts at an altitude of 90 km and holds many electrically charged atoms, thereby forming a protective “shield” against various forms of radiation from space, including, to some extent, radio waves. The degree of ionization shows a distinct night and day rhythm and also varies with solar activity.
The ionosphere is a more severe source of delay for satellite signals, which obviously means that pseudoranges are estimated as being larger than they actually are. When satellites emit radio signals at two or more frequencies, an estimate can be computed from differences in delay incurred for signals of different frequency, which enables correction for atmospheric delay, leading to a 10–50% improvement of accuracy. If this is not the case, or if the receiver is capable of receiving only a single frequency, a model should be applied to forecast the (especially ionospheric) delay; typically the model takes into account the time of day and current latitude of the receiver.
Errors related to the receiver’s environment
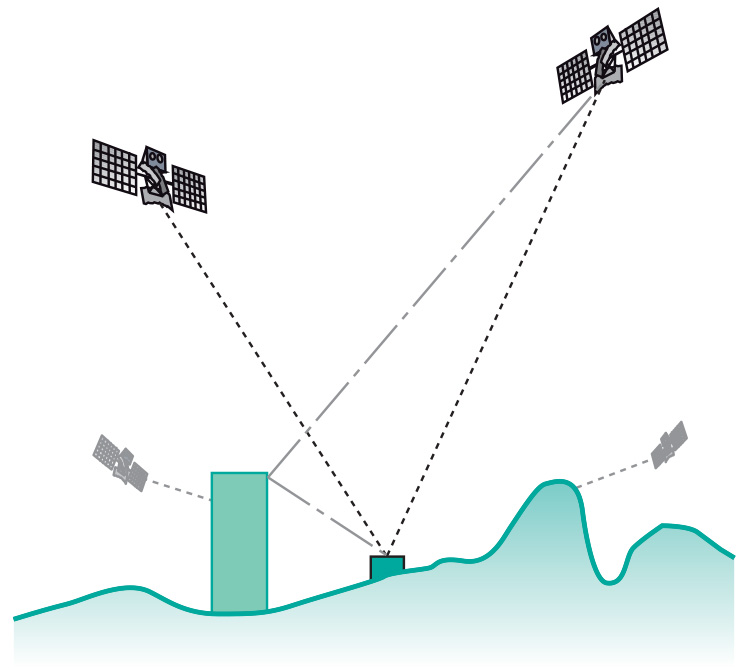
Fourth in the list of sources of error is that which occurs when a radio signal is received via two or more paths between sender and receiver, typically caused by the signal bouncing off some nearby surface such as a building or rock face. The term applied to this phenomenon is multi-path; when it occurs the multiple receptions of the same signal may interfere with each other (Figure 1). Multi-path is a source of error that is difficult to avoid.
All of the above sources of error influence computation of a satellite’s pseudorange. Cumulatively, they are called the user equivalent range error (UERE). Some error sources may affect all satellites being used by a particular receiver, e.g. selective availability and atmospheric delay, while others may be specific to one satellite, for instance, incorrect satellite information and multi-path.
Errors related to the relative geometry of satellites and receiver
There is one more source of error, which is unrelated to individual radio signal characteristics: rather, this error is the result of the combination of signals from satellites used for positioning. The constellation of satellites in the sky from the receiver’s perspective is the controlling factor in these cases. The sphere-intersection technique of positioning provides more precise results when the four satellites are evenly spread over the sky; the satellite constellation of Figure 2 b below is preferred over that of Figure 2a. This source of error is know as geometric dilution of precision (GDOP). GDOP is lower when satellites are just above the horizon in mutually opposed compass directions. However, such satellite positions have bad atmospheric delay characteristics, so in practice it is better if they are at least 15∘ above the horizon. When more than four satellites are in view, modern receivers use “least-squares” adjustment to calculate the best possible positional fix from all the signals. This gives a better solution that obtained just using the “best four”, as was done previously.

These errors are not all of similar magnitude. An overview of some typical values (without selective availability) is provided in the Table below. GDOP functions not so much as an independent error source but rather as a multiplying factor, decreasing the precision of position and time values obtained.
| satellite clock (m) | 2 |
| satellite position (m) | 2.5 |
| ionospheric delay (m) | 5 |
| tropospheric delay (m) | 0.5 |
| receiver noise (m) | 0.3 |
| multi-path (m) | 0.5 |
| Total RMSE Range error (m): | |
 = = |
5.99 |
The procedure that we discussed above is known as absolute, single-point positioning based on code measurement. It is the fastest and simplest, yet least accurate, means of determining a position using satellites. It suffices for recreational purposes and other applications that require horizontal accuracies to within 5–10 m. Typically, when encrypted military signals can also be used, on a dual-frequency receiver the achievable horizontal accuracy is 2–5 m.
Prior knowledge
Outgoing relations
- Errors in Absolute positioning is produced by Absolute positioning
Incoming relations
- Random error is a kind of Errors in Absolute positioning
- Systematic error is a kind of Errors in Absolute positioning