Buffer
Introduction
The principle of buffer zone generation is simple: we select one or more target locations and then determine the area around them within a certain distance.
In some case studies, zoned buffers must be determined, for instance in assessments of the effects of traffic noise. Most
In vector-based buffer generation, the buffers themselves become polygon features, usually in a separate data layer, that can be used in further spatial analysis. Buffer generation on rasters is a fairly simple function. The target location or locations are always represented by a selection of the raster’s cells and geometric distance is defined using cell resolution as the unit. The distance function applied is the Pythagorean distance between the cell centres. The distance from a non-target cell to the target is the minimal distance one can find between that non-target cell and any target cell.
Buffer generation on rasters is a fairly simple function. The target location or locations are always represented by a selection of the raster’s cells and geometric distance is defined using cell resolution as the unit. The distance function applied is the Pythagorean distance between the cell centres. The distance from a non-target cell to the target is the minimal distance one can find between that non-target cell and any target cell.
Examples
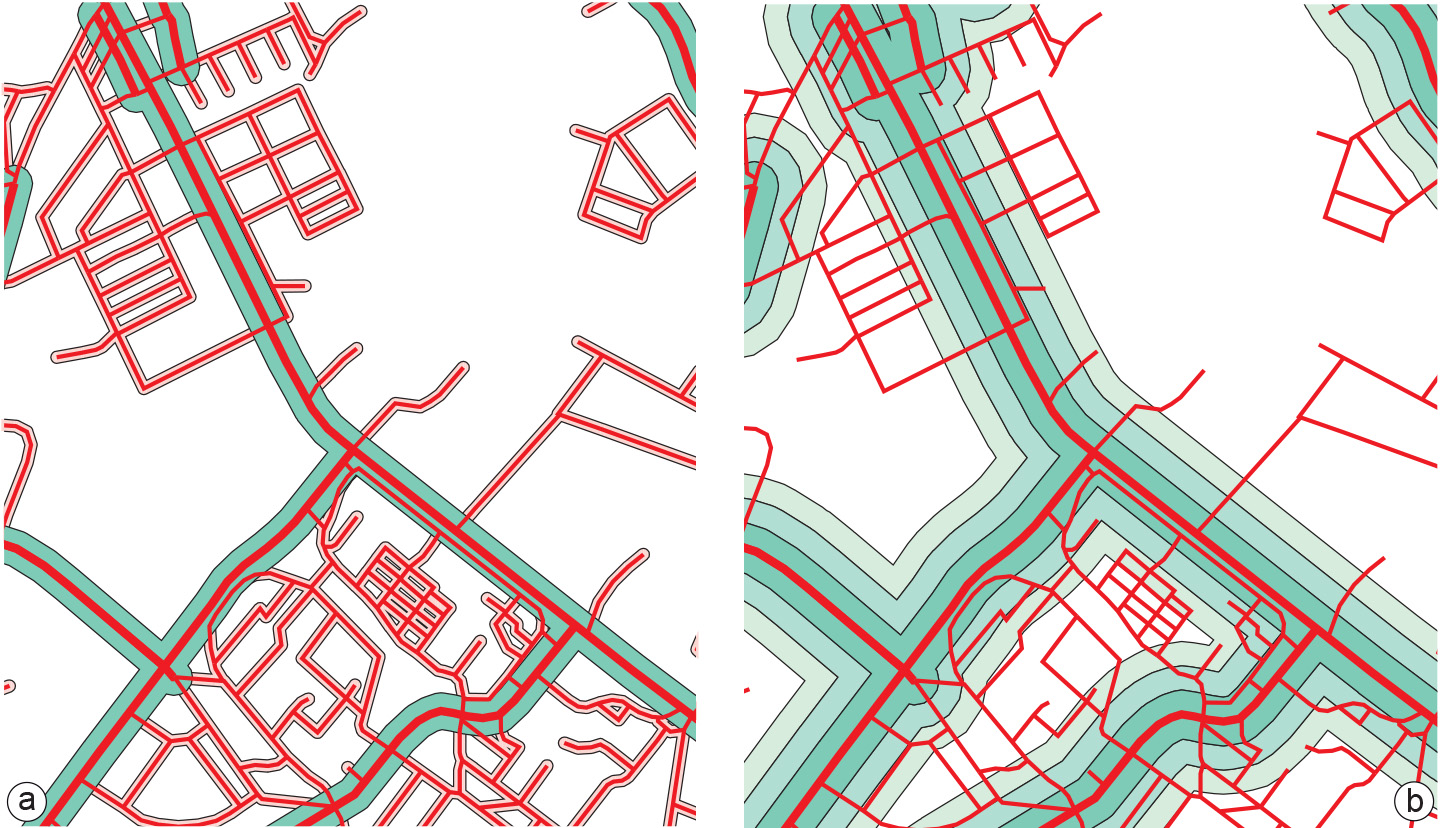
In Figure a, a number of main and minor roads were selected as targets and 75 m and 25 m (respectively) buffers were computed from them. A zoned buffer is illustrated in Figure b.
Learning outcomes
-
11 - Spatial analysis: classes of functions
Classify and explain spatial analysis functions (measurements, classification, overlay, neighbourhood and connectivity) in a raster and vector environment (level 1 and 2).
Prior knowledge
Outgoing relations
- Buffer is a kind of Neighbourhood operations